플래너 V4, 도구공간 순찰로봇 제어 소프트웨어 출시
순찰로봇 전문기업 도구공간이 자체 개발한 로봇 제어 소프트웨어 ‘플래너’ 의 최신 버전 V4 를 출시한다고 5일 밝혔다.
플래너는 도구공간의 순찰로봇과 사용자를 연결하는 핵심 애플리케이션으로, 프로그래밍 지식 없이도 누구나 쉽게 로봇을 운용할 수 있는 노코드(no-code) 기반 소프트웨어다.
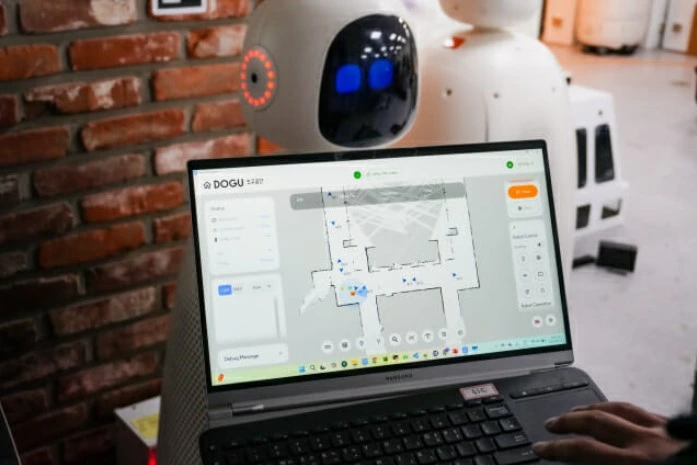
새롭게 개선된 플래너 V4 는 ▲순찰 현장 맵핑 ▲순찰 일정 관리 ▲미션 할당 ▲자율주행 시나리오 편집 ▲로봇 원격 조정 등을 직관적인 사용자 인터페이스(UI)를 통해 간편하게 수행할 수 있도록 설계됐다.
기존 제품 대비 대시보드 기능을 강화해 중요 정보와 작업 접근성을 높였으며, 카메라 그리드를 업데이트해 모니터링 편의성을 향상시켰다.
드래그 앤 드롭(Drag & Drop) 방식을 적용해 직관적인 작업이 가능하며, 확장된 지도 뷰를 지원해 지도 편집도 더욱 쉬워졌다.
다국어 지원을 포함해 전반적인 작업 효율성도 개선됐다.
또한, 윈도우, 맥OS, 리눅스, 안드로이드(태블릿) 등 다양한 운영체제를 지원해 사용자의 접근성을 높였다.
도구공간 관계자는 “플래너는 로봇 관리를 더 간단하고 스마트하게 도와주는 혁신적인 소프트웨어”라며 “앞으로도 지속적인 업데이트를 통해 AI 자율주행 순찰로봇 대중화를 이끌겠다”고 밝혔다.
도구공간은 기존 AI 자율주행 순찰로봇 관리자를 대상으로 플래너 V4와 사용 매뉴얼을 배포할 예정이다.
배동현 (grace8366@sabanamedia.com) 기사제보
관련 기사

ETRI, 날숨 분석으로 폐암 진단…정확도 95% 혁신 기술 공개

생수보다 정수기 선호↑…브리타, 친환경·경제성 강조

HCL테크, 삼성전자 SAFE 설계 파트너 합류

한컴-제주도, 디지털 행정 협력 MOU 체결

삼성전자 OLED TV, AI 기능 대거 탑재

KT, 군사급 보안 갖춘 AI 홈캠 ‘KT 홈캠 안심’ 출시